Class Diagrams
Robot Diagram
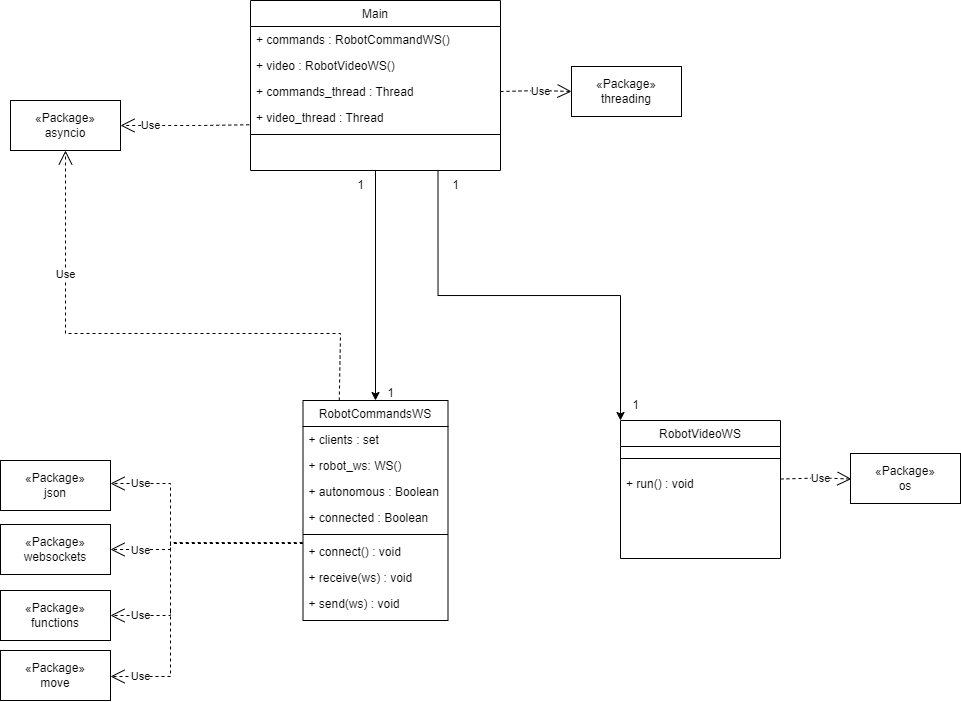
Robot Code
(Main) Class purpose: Main handler of robot functions. Also manages the websockets for sending data.
- Data Fields:
- commands:
- Type: RobotCommandsWS
- video:
- Type: RobotVideoWS
- commands_thread:
- Type: Thread
- video_thread:
- Type: Thread
- commands:
- Data Fields:
(RobotCommandWS) Class purpose: Provides a means for sending commands from the robot to the server.
Data Fields:
- clients:
- Type: Set
- robot_ws:
- Type: WebSocket
- autonomous:
- Type: boolean
- connected:
- Type: boolean
- clients:
Methods:
- connect() : void
- This method will connect the robot to the server through JSON websockets.
- Pre-conditions: None
- Parameters: None
- Return Values: None
- Exceptions thrown: None
- receive(WebSocket) : void
- This method will interpret commands received through the JSON websockets.
- Pre-conditions: None
- Parameters:
- Websocket: A JSON websocket connecting the the host server.
- Return Values: None
- Exceptions thrown: None
- send(WebSocket) : void
- This method will send data from the robot to the server through JSON websockets.
- Pre-conditions: None
- Parameters:
- WebSocket: A JSON websocket connecting the the host server.
- Return Values: None
- Exceptions thrown: None
- connect() : void
(RobotVideoWS) Class purpose: Send video data from the robot to the server.
- Data Fields:
- None
- Methods:
- run() : void
- This method take the images from the robot's onboard camera and send it through the JSON websocket.
- Preconditions: None
- Parameters: None
- Return Value: None
- Exceptions Thrown: None
- run() : void
- Data Fields:
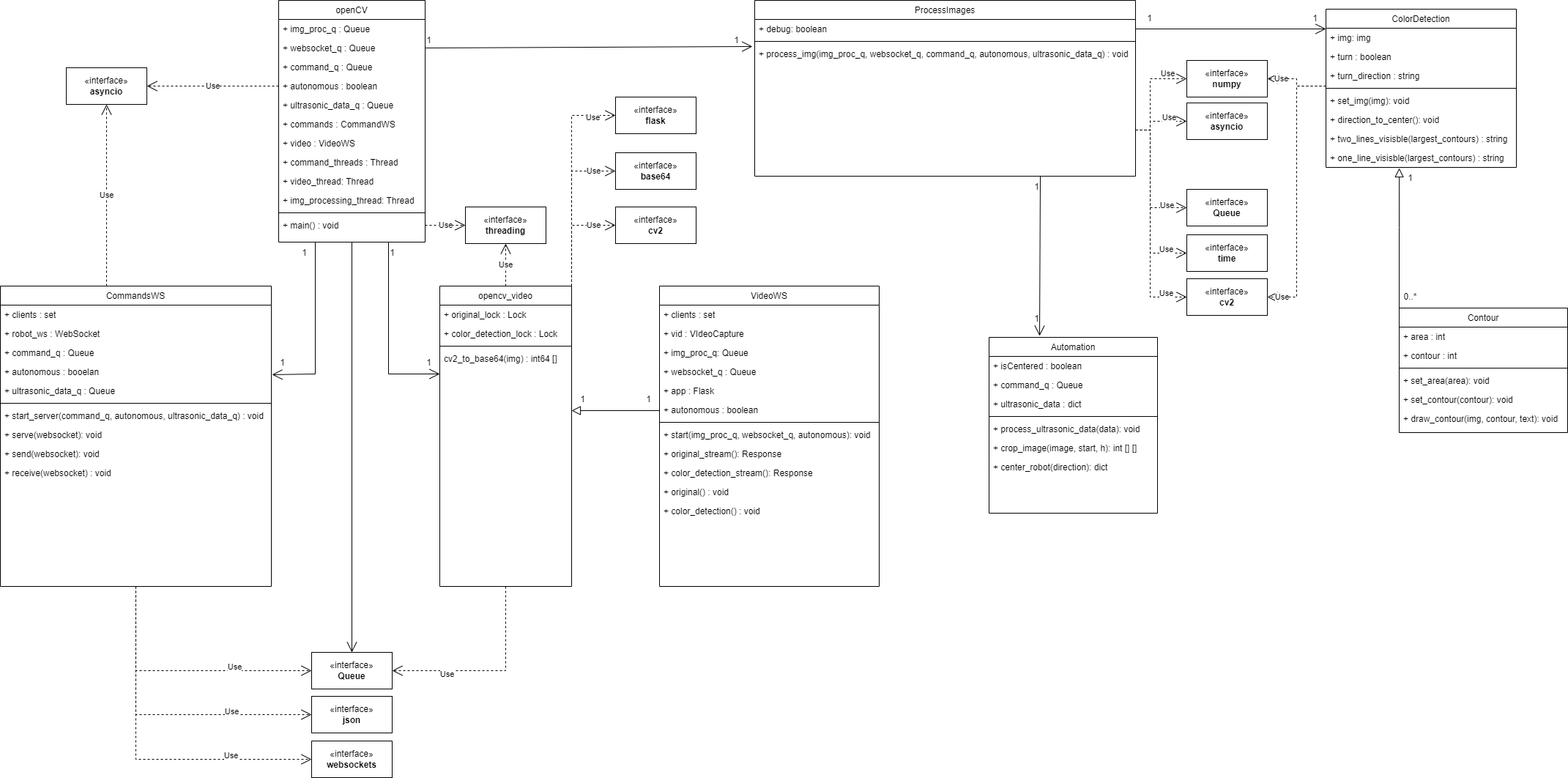
OpenCV Diagram
OpenCV Code
(openCV) Class Purpose: The controller for video feed display and image processing. Also handles command passing to the robot for both manual and autnomous mode.
- Data Fields:
- img_proc_q
- Type: Queue
- websocket_q
- Type: Queue
- command_q:
- Type: Queue
- autonomous:
- Type: boolean
- ultrasonic_data_q:
- Type: Queue
- commands:
- Type: CommandWS
- video:
- Type: VideoWS
- commands_thread:
- Type: Thread
- video_thread:
- Type: Thread
- img_processing_thread:
- Type: Thread
- img_proc_q
- Data Fields:
(opencv_video) Class purpose: Handles the processing and passing of video images.
- Data Fields:
- original_lock
- Type: Lock
- color_detection_lock
- Type: Lock
- original_lock
- Methods:
- cv2_to_base64(img) : int64 []
- This method will take the image from the video feed and convert it to base64 array.
- Parameters:
- img: An image received received from the robot in cv2 format.
- Pre-conditions: Must be connected to the robot websocket delivering images from the onboard camera
- Post-conditions: None
- Return Values: An array of base64 integers
- Exceptions Thrown: None
- cv2_to_base64(img) : int64 []
- Data Fields:
(VideoWS) Class purpose: Connects to the websocket port and creates two video feeds, one of the original video data and one of the processed images from the onboard camera.
- Data Fields:
- clients:
- Type: set
- vid:
- Type: VideoCapture
- img_proc_q:
- Type: Queue
- websocket_q:
- Type: Queue
- app:
- Type: Flask
- autonomous:
- Type boolean
- clients:
- Methods:
- start(img_proc_q, websocket_q, autonomous) : void
- This method connects to the websocket queue for both the image processing and display of original video
- Parameters:
- img_proc_q: A queue of processed images to send to the website.
- websocket_q: A queue of images received from the robot.
- autonomous: A boolean value to indicate whether or not the autonomous logic should be executed.
- Pre-conditions: Connection to both website and robot
- Post-conditions: None
- Return Values: None
- Exceptions Thrown: None
- original_stream(): Response
- This method takes in the images from the robot to send to the website.
- Parameters: None
- Pre-conditions: A successful connection to the robot and to the website.
- Post-conditions: None
- Return Values:
- Returns a Response object to send to the website.
- Exceptions THrown: None
- color_detectionStream(): Response
- This method take processed images to send to the website..
- Parameters: None
- Pre-conditions: A successful connection to the robot and to the website.
- Post-conditions: None
- Return Values:
- Returns a Response object to send to the website.
- Exceptions THrown: None
- original() : void
- This method control the lock on the queue of images from the video feed of the robot to the website.
- Parameters: None
- Pre-conditions: A successful connection to the robot and to the website.
- Post-conditions: None
- Return Values: None
- Exceptions Thrown: None
- color_detection() : void
- This method controls the lock on the queue of processed images from the server to the website.
- Parameters: None
- Pre-conditions: A successful connection to the robot and to the website.
- Post-conditions: None
- Return Values: None
- Exceptions Thrown: None
- start(img_proc_q, websocket_q, autonomous) : void
- Data Fields:
(CommandsWS) Class purpose: Handles the sending of commands through either manual or autonomous mode.
Data Fields:
- clients:
- Type: set
- robot_ws:
- Type: WebSocket
- command_q:
- Type: Queue
- autonomous:
- Type: boolean
- ultrasonic_data_q:
- Type Queue
- clients:
Methods:
start_server(command_q, autonomous, ultrasonic_data_q) : void
- This method starts the connection to the robot and begins populating the Queues with data or commands.
- Parameters:
- command_q: The queue to send commands to the robot.
- autonomous: The boolean flag to run or stop the autonomous logic for robot movement.
- ultrasonic_data_q: The queue to receive data from the robot using the ultrasonic sensor.
- Pre-conditions: Successful connection to robot and website host.
- Post-conditions: None
- Return values: None
- Exceptions Thrown: None
serve(websocket): void
- This method sends data and receives commands from the website.
- Parameters:
- Websocket: A JSON websocket.
- Pre-conditions: Successful connection to robot and the website host.
- Post-conditions: None
- Return values: None
- Exceptions Thrown: None
receive(websocket): void
- This method will receive commands from the website as well as flag to set the autonomous function.
- Parameters:
- Websocket: A JSON websocket.
- Pre-conditions: Successful connections to the robot and the website host.
- Post-conditions: None
- Return values: None
- Exceptions Thrown: None
send(WebSocket) : void
- This method will send data from the server to the robot through JSON websockets.
- Pre-conditions: None
- Parameters:
- WebSocket: A JSON websocket connecting the the host server.
- Return Values: None
- Exceptions thrown: None
(process_images) Class purpose: Processes the images received from the robot.
- Data Fields:
- debug:
- Type: boolean
- debug:
- Methods:
- process_img(img_proc_q, websocket_q, command_q, autonomous, ultrasonic_data_q) : void
- This method processes the images received. If in manual mode, sends commands from website to robot. If in autonomous mode, executes the logic to send commands to the robot.
- Parameters:
- img_proc_q: A queue of processed images received to send to the website.
- websocket_q: A queue of images received from the robot.
- command_q: A queue of commands to send to the robot. All commands are in dict format.
- autonomous: A list of a single boolean value.
- ultrasonic_data_q: A queue of ultrasonic data received from the robot in dict format.
- Pre-conditions: None
- Post-conditions: None
- Return values: None
- Exceptions Thrown: None
- process_img(img_proc_q, websocket_q, command_q, autonomous, ultrasonic_data_q) : void
- Data Fields:
(automation) Class purpose: The automation logic to execute to the robot.
- Data Fields:
- isCentered:
- Type: boolean
- commands_q:
- Type: Queue
- ultrasonic_data:
- Type: dict
- isCentered:
- Methods:
- process_ultrasonic_data(data) : void
- This method processes individual ultrasonic data packets pulled from the ultrasonic data queue.
- Parameters:
- data: The data received from the robot. This will be a dict item.
- Pre-conditions: None
- Post-conditions: None
- Return values: None
- Exceptions Thrown: None
- crop_image(image, start, h) : int [][]
- This method crops the image received from the robot onboard camera.
- Parameters:
- image: The image received from the robot. This is pulled from the websocket queue.
- start: An integer value depicting the index of the image in array form.
- h: An integer value representing the height of the image to be cut.
- Pre-conditions: None
- Post-conditions: None
- Return values: An integer array holding X and Y pixel matrix of the image.
- Exceptions Thrown: None
- center_robot(direction) : dict
- This method returns a dictionary item of the specific direction to turn the robot.
- Parameters:
- direction: A string value of which way to turn the robot.
- Pre-conditions: None
- Post-conditions: None
- Return values: A dictionary item holding the direction, turn, and speed values to turn the robot.
- Exceptions Thrown: None
- process_ultrasonic_data(data) : void
- Data Fields:
(ColorDetection) Class purpose: Detects the color between the selected range defined in the color_detection class.
- Data Fields:
- img:
- Type: Image
- turn:
- Type: boolean
- turn_direction:
- Type: string
- img:
- Methods:
- set_img(img) : void
- This methods sets the image for color detection.
- Parameters:
- img: An image received from the robot onboard camera.
- Pre-conditions: None
- Post-conditions: None
- Return values: None
- Exceptions Thrown: None
- direction to center(): string
- This methods returns a dictionary item that hold the values to center the robot. If there is two contours, calls two_lines visible method. If only a single contour, calls one_line_visible method. If no contours, sends backward command.
- Parameters: None
- Pre-conditions: None
- Post-conditions: None
- Return values: A dictionary item holding the direction, turn, and speed values to the center between two contours or a single contour.
- Exceptions Thrown: None
- two_lines_visible(largest_contours) : string
- This method decides if the robot is centerd between two detected contours.
- Parameters:
- largest_contours: A list of the largest contours detected from the image of the color specified in color_detection.
- Pre-conditions: Two contours detected within the image.
- Post-conditions: None
- Return value: A string of 'left', 'right', 'forward', or 'backward'.
- Exceptions Thrown: None
- one_line_visible(largest_contours) : String
- This method returns a string object to center the robot. A single contour is only possible of the robot needs to make a turn.
- Parameters:
- largest_contours: A list of the largest contours detected from the image of the color specified in color_detection.
- Pre-conditions: Only one contour detected within the image.
- Post-conditions: Turn the robot to bring back two contours into the image.
- Return value: A string of 'left', 'right', 'forward', or 'backward'.
- Exceptions Thrown: None
- set_img(img) : void
- Data Fields:
(Contour) Class purpose: An object over the image received from the robot depicting the area of the color defined.
- Data Fields:
- area:
- Type: An integer value of the area to select.
- contour:
- Type: A contour of the detected value.
- area:
- Methods:
- draw_contour(img, contour, text) : void
- This method draws the contour over the image received from the robot image queue.
- Parameters:
- img: The image in cv2 format received from the robot image queue.
- contour: The contour object to put over the image.
- text: A string value to put next to the contour placed over the image.
- Pre-conditions: None
- Post-conditions: None
- Return values: None
- Exceptions Thrown: None
- draw_contour(img, contour, text) : void
- Data Fields:
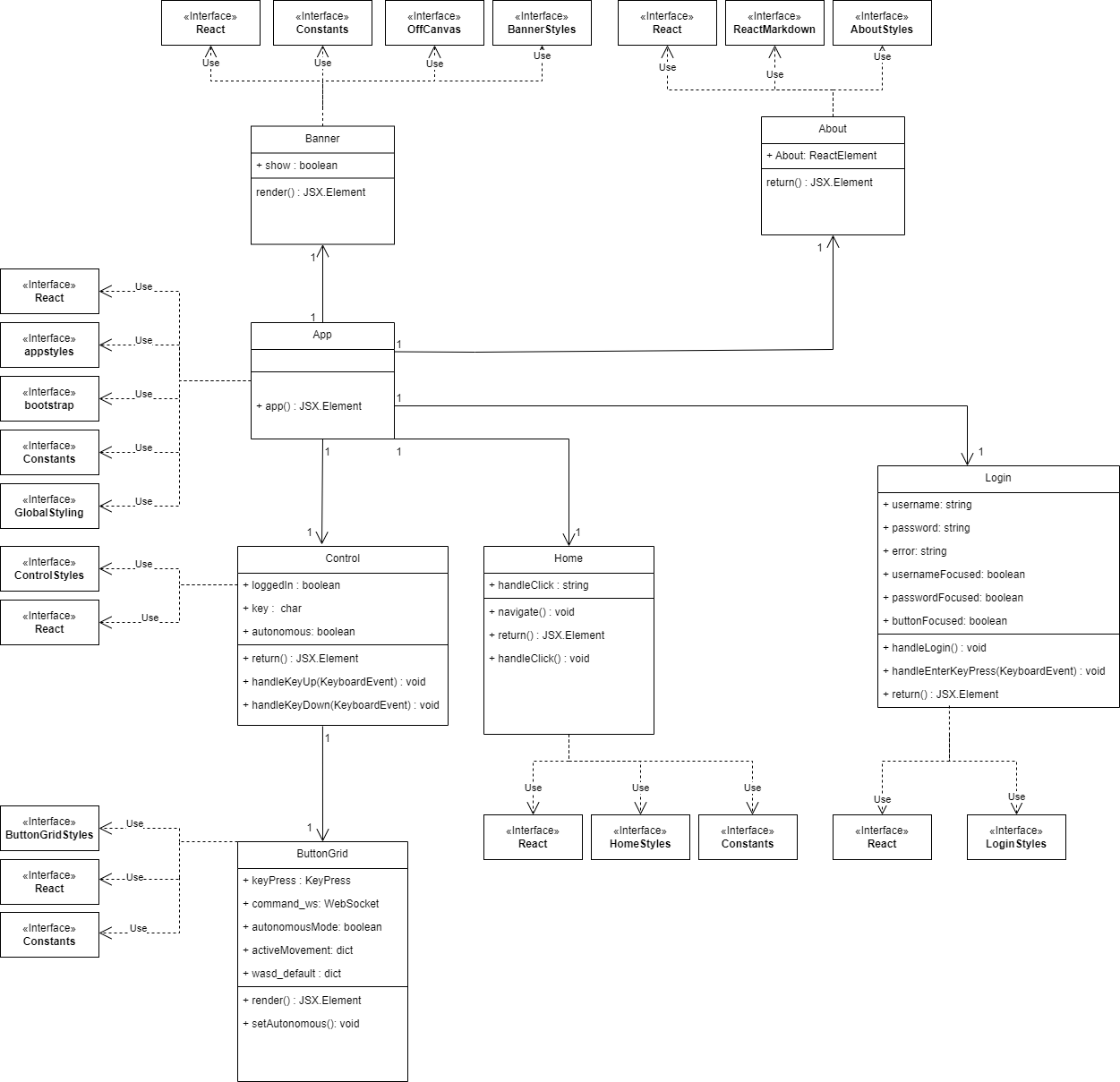
Website Diagram
Website Code
(App) Class purpose: Main executable handler for the website.
- Data Fields:
- None
- Methods:
- app(): JSX.Element
- Runs and manages interactions between
- Pre-conditions: None
- Post-conditions: None
- Parameters:
- None
- Returns: A JSX.Element object to be sent to the website.
- Exceptions Thrown: None
- app(): JSX.Element
- Data Fields:
(Banner) Class purpose: Website code to manage interaction menu for the user.
- Data Fields:
- show
- Type: boolean
- show
- Methods:
- render(): JSX.Element
- Displays and manages user interaction with the banner menu.
- Pre-conditions: The server and robot must be initialized and connected.
- Post-conditions: None
- Parameters:
- None
- Returns: A JSX.Element object to be sent to the website.
- Exceptions Thrown: None
- render(): JSX.Element
- Data Fields:
(About) Class purpose: Handles the display of about information to the website.
Data Fields:
- About
- Type: ReactElement
- About
Methods:
- return(): JSX.Element
- Returns and displays elements of the About page to the website as an html embedded JavaScript Object
- Pre-Conditions: The server and robot must be initialized and connected.
- Post-Conditions: None
- Parameters: None
- Returns: JSX.Element
- Exceptions Thrown: None
- return(): JSX.Element
(Control) Class purpose: Handles rendering and interaction of the control page to the website.
Data Fields:
- loggedIn:
- Type: boolean
- key:
- Type: char
- autonomous:
- Type: boolean
- loggedIn:
Methods:
return(): JSX.Element
- Returns and displays elements of the Control page to the website as an html embedded JavaScript Object
- Pre-Conditions: The server and robot must be initialized and connected.
- Post-Conditions: None
- Parameters: None
- Returns: JSX.Element
- Exceptions Thrown: None
handleKeyUP(KeyboardEvent) : void
- Sets the states of key presses to true depending on the specific key pressed.
- Pre-conditions: None
- Post-conditions: None
- Parameters:
- KeyboardEvent: The specific key pressed.
- Returns: None
- Exceptions Thrown: None
handleKeyUP(KeyboardEvent) : void
- Sets the states of key presses to false depending on the specific key pressed.
- Pre-conditions: None
- Post-conditions: None
- Parameters:
- KeyboardEvent: The specific key pressed let go on the keyboard.
- Returns: None
- Exceptions Thrown: None
(ButtongGrid) Class purpose: Handles the rendering of the buttons on the control page.
Data Fields:
- keyPress:
- Type: KeyPress
- command_ws:
- Type: WebSocket
- autonomousMode:
- Type: boolean
- activeMovement:
- Type: dict
- wasd_default:
- Type: dict
- keyPress:
Methods:
- render(): JSX.Element
- Renders the button grid layout of controls.
- Pre-Conditions: The server and robot must be initialized and connected.
- Post-Conditions: None
- Parameters: None
- Returns: A JSX.Element object to be sent to the website.
- Exceptions Thrown: None
- setAutonomous() : void
- Sets the autonomous flag for autonomous mode.
- Pre-Conditions: The server and robot must be initialized and connected.
- Post-Conditions: None
- Parameters: None
- Returns: None
- Exceptions Thrown: None
- render(): JSX.Element
(Home) Class purpose: Handles the rendering and interaction of the home page to the website.
- Methods:
- navigate(): void
- Handles the navigation of the user to different components of the website.
- Pre-Conditions: None
- Post-Conditions: None
- Parameters: None
- Returns: None
- Exceptions thrown: None
- return(): void
- Returns the home page to the website.
- Pre-conditions: The server and robot must be initialized and connected.
- Post-conditions: None
- Parameters: None
- Returns: None
- Exceptions Thrown: None
- navigate(): void
- Methods:
(Login) Class purpose: Handles the rendering and interaction of the login page of the website.
Data Fields:
- username
- Type: string
- password:
- Type: string
- error:
- Type: string
- usernameFocused:
- Type: boolean
- passwordFocused:
- Type: boolean
- buttonFocused:
- Type: boolean
- username
Methods:
- handleLogin(): void
- Handles the logic of login to the website for control page access.
- Pre-Conditions: The server and robot must be initialized and connected.
- Post-Conditions: None
- Parameters: None
- Returns: A React.ReactElement
- Exceptions thrown: None
- handleEnterKeyPress(KeyboardEvent): void
- Waits to verify username and password until the Enter key is pressed.
- Pre-Conditions: None
- Parameters:
- KeyboardEvent: If the enter key is pressed, conditions are set to execute code.
- Returns: None
- Exceptions Thrown: None
- return(): void
- Returns the login page to the website.
- Pre-conditions: The server and robot must be initialized and connected.
- Post-conditions: None
- Parameters: None
- Returns: None
- Exceptions Thrown: None
- handleLogin(): void